Abstract
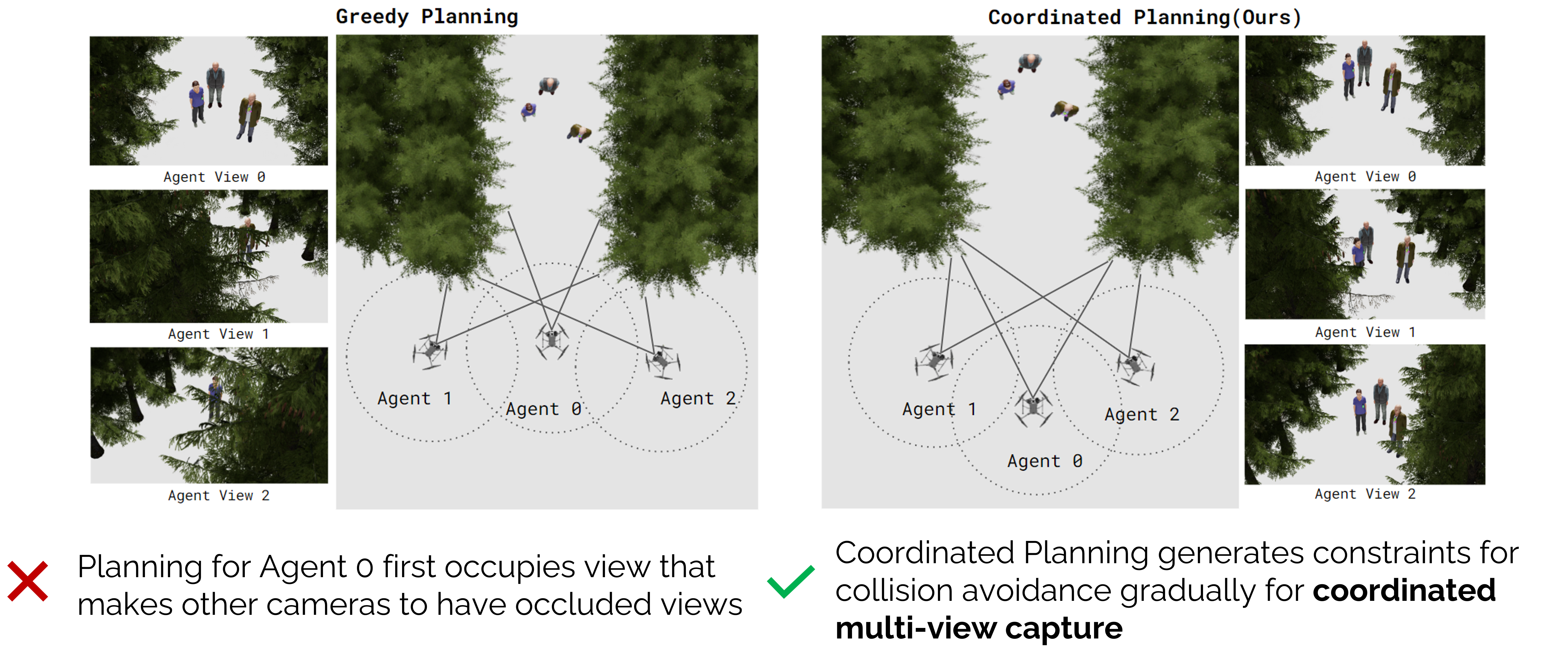
Motion capture has become increasingly important, not only in computer animation but also in emerging fields like virtual reality, bioinformatics, and humanoid training. Capturing outdoor environments offers extended horizon scenes but introduces challenges with occlusions and obstacles. Recent approaches using multi-drone systems to capture multiple actor scenes often fail to account for multi-view consistency and reasoning across cameras in cluttered environments. Coordinated motion Capture (CoCap), inspired by Conflict-Based Search (CBS), addresses this issue by coordinating view planning to ensure multi-view reasoning during conflicts. In scenarios with high occlusions and obstacles, where the likelihood of inter- robot collisions increases, CoCap demonstrates performance that approaches the ideal outcomes of unconstrained planning, out- performing existing sequential planning methods. Additionally, CoCap offers a single-robot view search approach for real-time applications in dense environments.
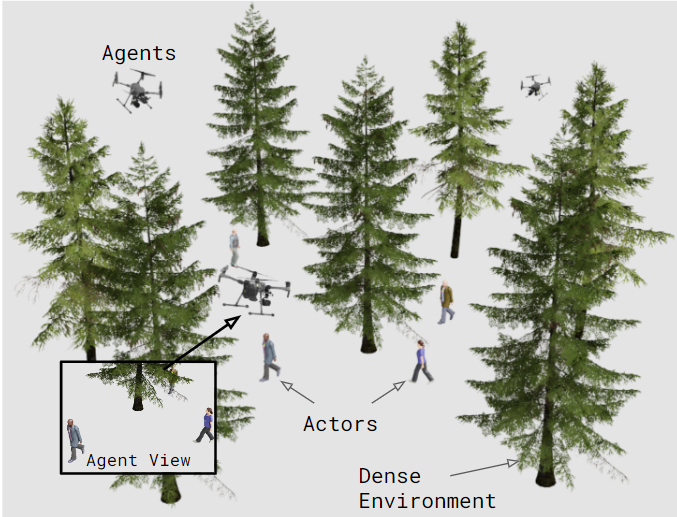
Need for Enhancing Motion Capture Techniques for Outdoor Settings.
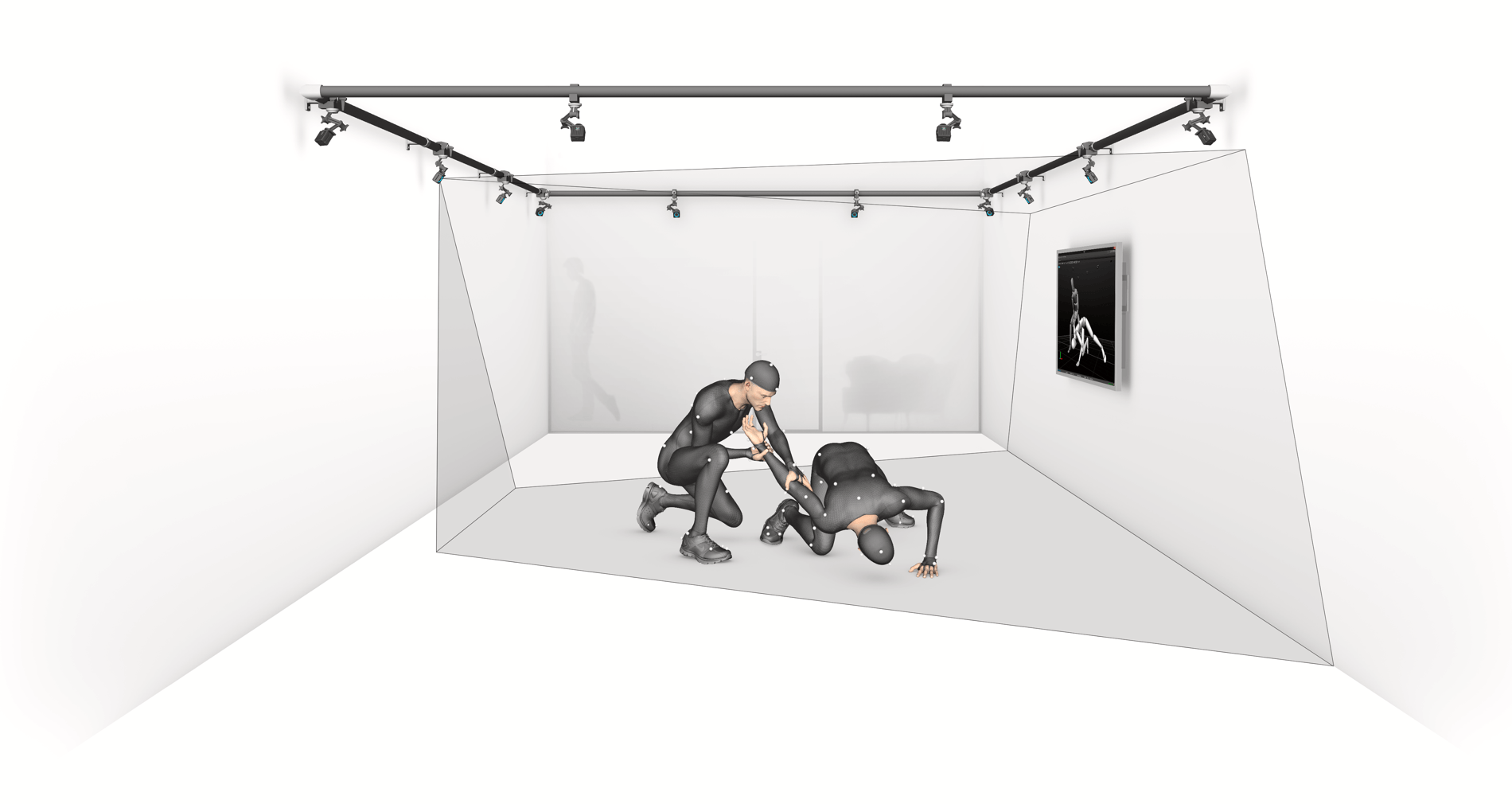
Motion Capture of multi-actor scenes for virtual production
(Figure referenced from Optitrack)

Outdoor scenes provide long horizon motion capture sequence
(Figure referenced from Optitrack)

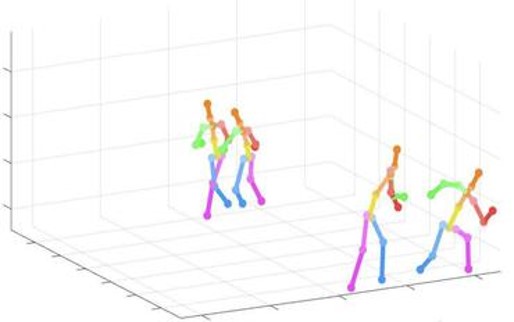
Motion capture provides high quality data for humanoid training
(Harrison Schell from madevisual.co)
Key factors in high-quality multi-actor motion capture.

Multi-view capture

Occlusion reasoning
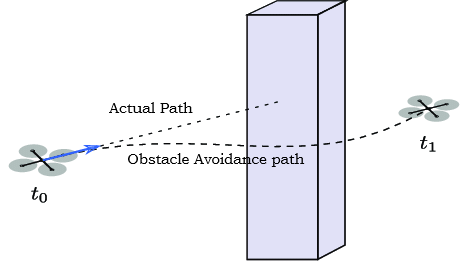
Obstacle Avoidance
Multi-person coverage
(Figure referenced from paperswithcode.com)
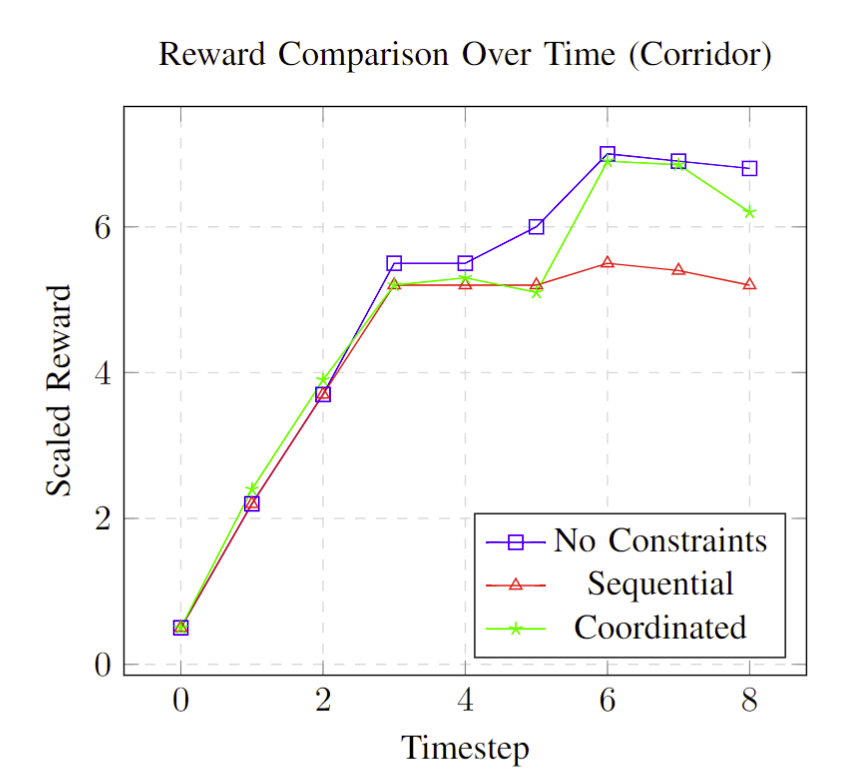
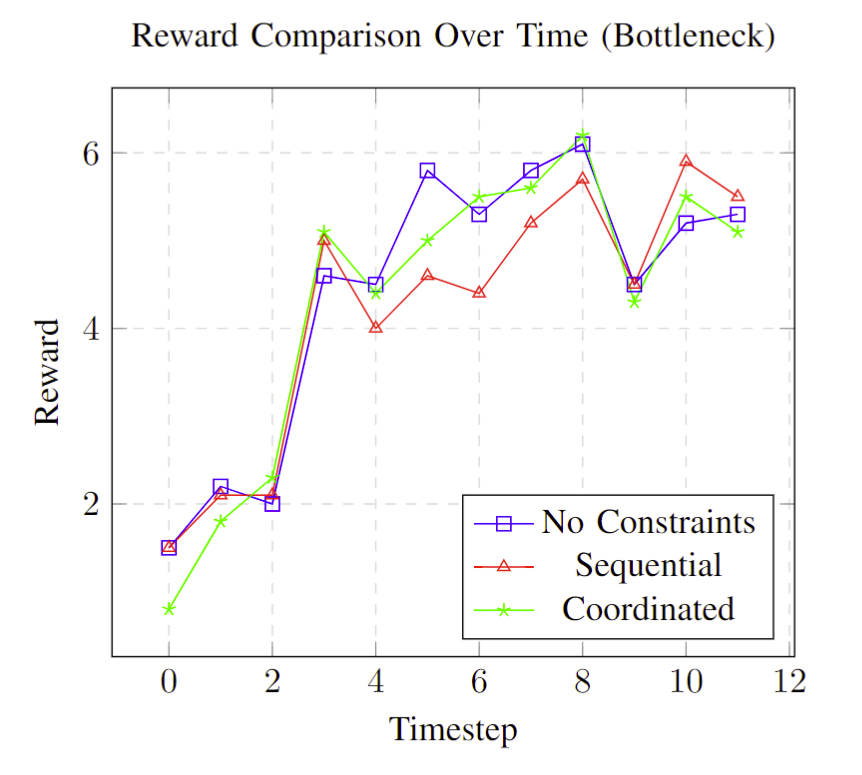
Reward Comparison:
Scenarios
2.5D Map
Corridor
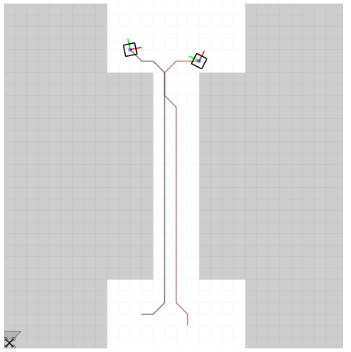
Total actors: 2
Total horizon: 8
#Robots: 2
Bottleneck
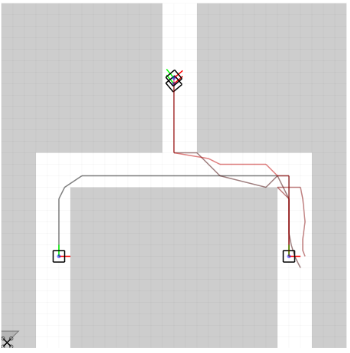
Total actors: 4
Total horizon: 12
#Robots: 4
BibTeX
@misc{rauniyar2024cocapcoordinatedmotioncapture,
title={CoCap: Coordinated motion Capture for multi-actor scenes in outdoor environments},
author={Aditya Rauniyar and Micah Corah and Sebastian Scherer},
year={2024},
eprint={2412.20695},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2412.20695},
}